
パラレルリンクロボットとは?高速で精密な動作が可能な産業用ロボットを解説
Contents
パラレルリンクロボットってどんな機器?
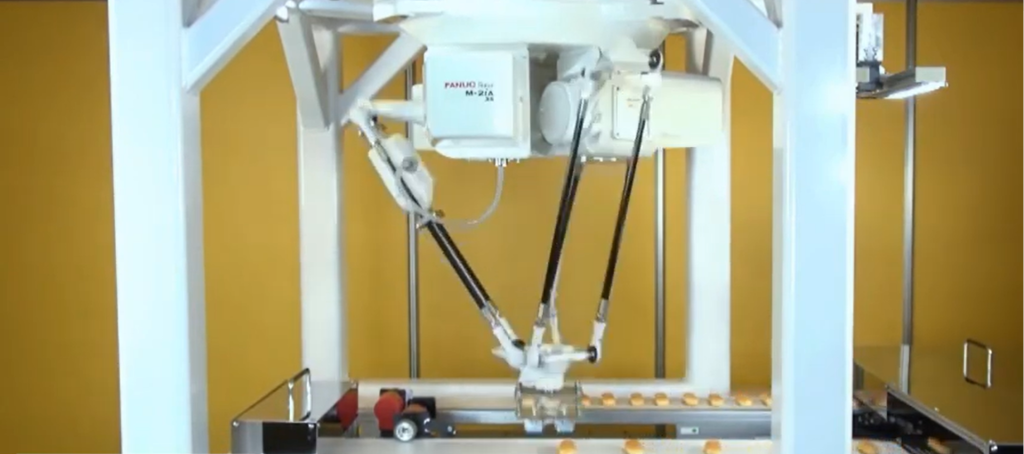
「パラレルリンクロボット」は、複数の軸(アーム)につながれた先端部が精密に動作し、高精度に作業を行う産業用ロボットです。「デルタロボット」や「高速多関節ロボット」とも呼ばれています(ファナック製パラレルリンクロボットは「ゲンコツロボット」という名称で販売されています)。
パラレルリンクロボットはどんなことができる?
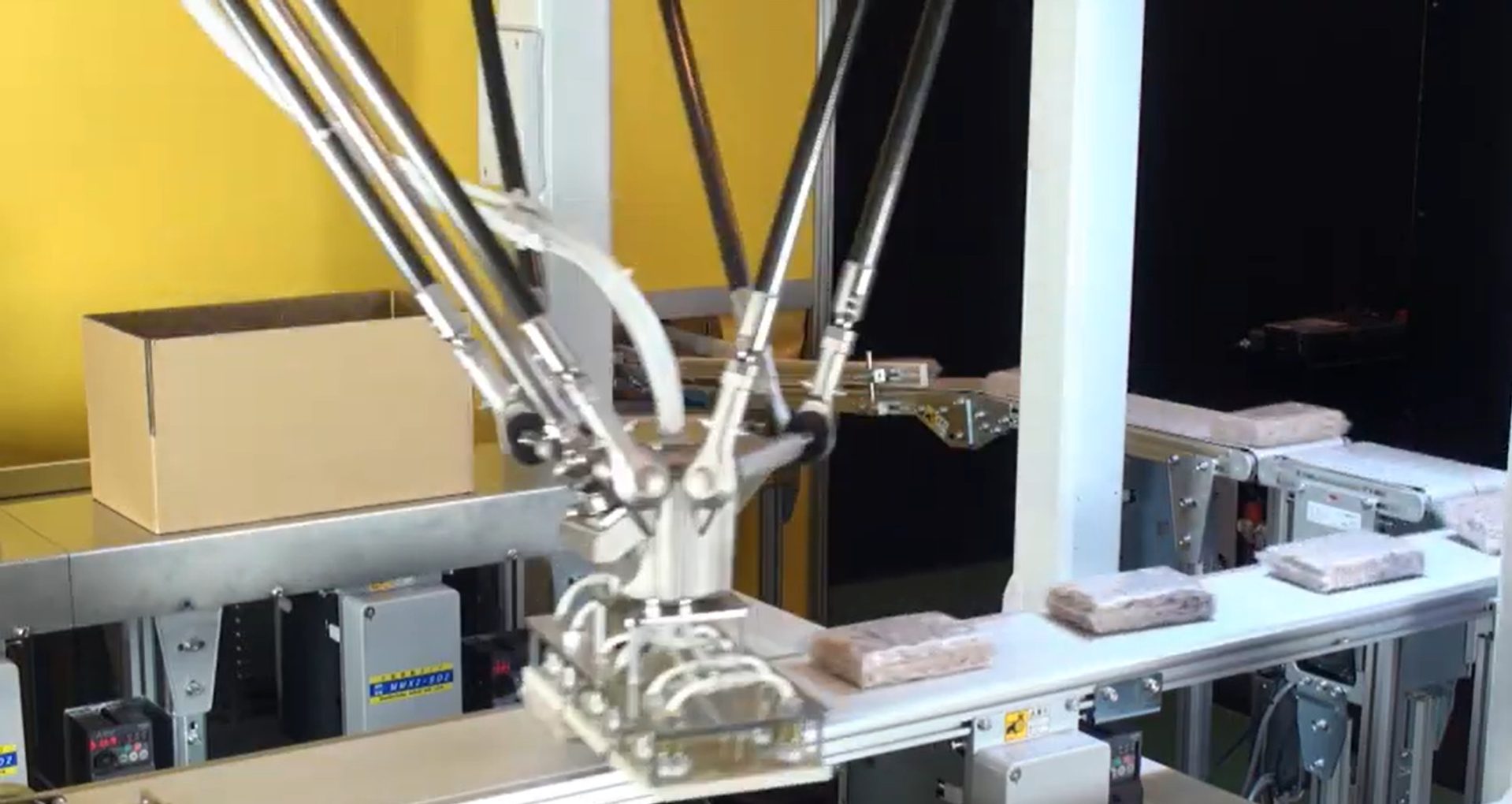
「パラレルリンクロボット」は天井や装置上部に固定され、吊り下げられる形で運用します。パラレルは「並列」を意味しており、一般的な「パラレルリンクロボット」は並列に配置された3本のアームが先端部に繋がっています。3本のアームはそれぞれが個別のモーターによって独立して動きますが、最終的には連結している先端部に出力先が集中する形となり、高速・高精度な動作を可能としています。その一方で、「多関節ロボット」に比べると可動範囲が限定されてしまうという特性があります。

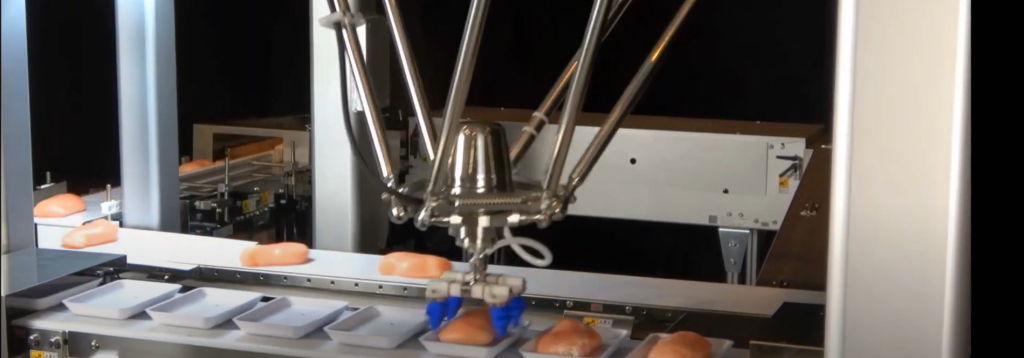
「パラレルリンクロボット」はその構造と特性から小型・軽量ワークを取り扱いに向いています。高速で精密な動作を活かした「ピック&プレース(搬送)」や「ライン上の仕分け作業」などの作業に非常に適しています。
主なパラレルリンクロボットメーカー
現在、パラレルリンクロボットを製造している主なメーカーです。
あ行
イグス株式会社
ABB株式会社
オムロン株式会社
か行
川崎重工業株式会社
KUKA Japan株式会社
さ行
た行
な行
は行
パナソニック株式会社
ファナック株式会社
ま行
ムラテックメカトロニクス株式会社
や行
株式会社安川電機




